 LK Automation Limited
LK Automation Limited
Brand Sort:
MITSUBISHI
MITSUBISHI FR-CVL-H37K Price

- Brand: MITSUBISHI
- Country: JAPAN
- Name:
- Model: FR-CVL-H37K
- Price: U.S.$ 1235.59
MITSUBISHI FR-CVL-H37K
MITSUBISHI motor universal AC servo amplifier MELSERVO-J3 series.
Rated output: 0.6kw.
Interface type: SSCNET type III fiber communication.
Full closed loop control.
Power specification: single phase AC200V.
High precision and high response location control.
Full closed loop control can be realized by double feedback control method.
Dual feedback control can be performed between the servo motor encoder and the load side encoder FR-CVL-H37K
MR-J3-B-RJ006 can be used in conjunction with a number of manufacturers of linear encoder,
Users can build the system according to their own accuracy requirements. ABS type linear encoder using serial interface,
No need to install the battery on the servo amplifier can easily build the absolute position detection system.
Flexible system configuration.
Can achieve higher load side positioning accuracy!Cable length: 6m.
Connection between a connector adapter box and a smart GOT.
Applicable model: HandyGOT. Input type: DC input, positive common end.
Input points: 16 points.
Enter the response time: 1.5ms the following.
Rated input voltage / current: DC24V/7mA.
External connection: 2~4 line type.
Waterproof connector type.
Strong waterproof type of IP67 protection grade.
No need to stop the system can be replaced module.
Without the use of tools can be a simple connection, save time.
Terminal resistor built-in.
Can be installed along the 6 direction.
Hardware simulation method is to use a number of hardware equipment to simulate the generation of the signal,
The signals are connected to the input end of the PLC system in a hard wired way, and the timeliness is strong.
Software simulation method is in the MITSUBISHI PLC in the preparation of a set of simulation program,
The simulation provides the field signal, which is simple and easy to operate, but it is not easy to guarantee the timeliness.
Simulation of the process of debugging, debugging method can be used to segment, and the monitoring function of programmer. Input points: 32 points.
Voltage: DC12/24V.
Current: 3/7mA.
Response time: 10ms.
16 points / a common end.
Positive pole sharing.
36 point terminal station.
Each scanning process. Focus on the input signal sampling. Focus on the output signal to refresh.
Input refresh process. When the input port is closed,
Program in the implementation phase, the input end of a new state, the new state can not be read.
Only when the program is scanned, the new state is read.
A scan cycle is divided into the input sample, the program execution, the output refresh.
The contents of the component image register are changed with the change of the execution of the program.
The length of the scan cycle is determined by the three.
CPU the speed of executing instructions.
Time of instruction.
Instruction count.
Due to the adoption of centralized sampling.
Centralized output mode.
There exist input / output hysteresis phenomena, i.e., the input / output response delay.
PLC selection with the development of PLC technology, more and more types of PLC products,
Function is becoming more and more perfect, and its application is more and more extensive.
Different series of different models of PLC has different performance, applicable occasions also have different emphasis,
Price also has a greater difference. Therefore PLC selection,
Under the premise of meeting the control requirements,
Should consider the best performance to price ratio, a reasonable choice of PLC.
System program memory for storing system program,
Including management procedures, monitoring procedures, as well as the user program to do the compiler to compile the process of interpretation.
Read only memory. Manufacturers use, content can not be changed, power does not disappear.
FR-CVL-H37K Operation manual/Instructions/Model selection sample download link: /searchDownload.html?Search=FR-CVL-H37K&select=5
Rated output: 0.6kw.
Interface type: SSCNET type III fiber communication.
Full closed loop control.
Power specification: single phase AC200V.
High precision and high response location control.
Full closed loop control can be realized by double feedback control method.
Dual feedback control can be performed between the servo motor encoder and the load side encoder FR-CVL-H37K
MR-J3-B-RJ006 can be used in conjunction with a number of manufacturers of linear encoder,
Users can build the system according to their own accuracy requirements. ABS type linear encoder using serial interface,
No need to install the battery on the servo amplifier can easily build the absolute position detection system.
Flexible system configuration.
Can achieve higher load side positioning accuracy!Cable length: 6m.
Connection between a connector adapter box and a smart GOT.
Applicable model: HandyGOT. Input type: DC input, positive common end.
Input points: 16 points.
Enter the response time: 1.5ms the following.
Rated input voltage / current: DC24V/7mA.
External connection: 2~4 line type.
Waterproof connector type.
Strong waterproof type of IP67 protection grade.
No need to stop the system can be replaced module.
Without the use of tools can be a simple connection, save time.
Terminal resistor built-in.
Can be installed along the 6 direction.
Hardware simulation method is to use a number of hardware equipment to simulate the generation of the signal,
The signals are connected to the input end of the PLC system in a hard wired way, and the timeliness is strong.
Software simulation method is in the MITSUBISHI PLC in the preparation of a set of simulation program,
The simulation provides the field signal, which is simple and easy to operate, but it is not easy to guarantee the timeliness.
Simulation of the process of debugging, debugging method can be used to segment, and the monitoring function of programmer. Input points: 32 points.
Voltage: DC12/24V.
Current: 3/7mA.
Response time: 10ms.
16 points / a common end.
Positive pole sharing.
36 point terminal station.
Each scanning process. Focus on the input signal sampling. Focus on the output signal to refresh.
Input refresh process. When the input port is closed,
Program in the implementation phase, the input end of a new state, the new state can not be read.
Only when the program is scanned, the new state is read.
A scan cycle is divided into the input sample, the program execution, the output refresh.
The contents of the component image register are changed with the change of the execution of the program.
The length of the scan cycle is determined by the three.
CPU the speed of executing instructions.
Time of instruction.
Instruction count.
Due to the adoption of centralized sampling.
Centralized output mode.
There exist input / output hysteresis phenomena, i.e., the input / output response delay.
PLC selection with the development of PLC technology, more and more types of PLC products,
Function is becoming more and more perfect, and its application is more and more extensive.
Different series of different models of PLC has different performance, applicable occasions also have different emphasis,
Price also has a greater difference. Therefore PLC selection,
Under the premise of meeting the control requirements,
Should consider the best performance to price ratio, a reasonable choice of PLC.
System program memory for storing system program,
Including management procedures, monitoring procedures, as well as the user program to do the compiler to compile the process of interpretation.
Read only memory. Manufacturers use, content can not be changed, power does not disappear.
FR-CVL-H37K Operation manual/Instructions/Model selection sample download link: /searchDownload.html?Search=FR-CVL-H37K&select=5
...more relevant model market price >>>>
Related products
MITSUBISHI
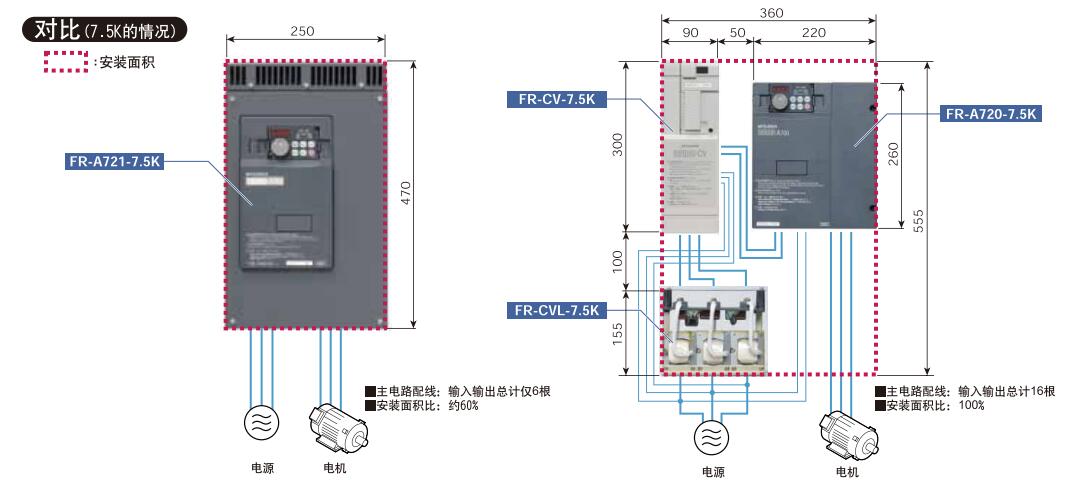
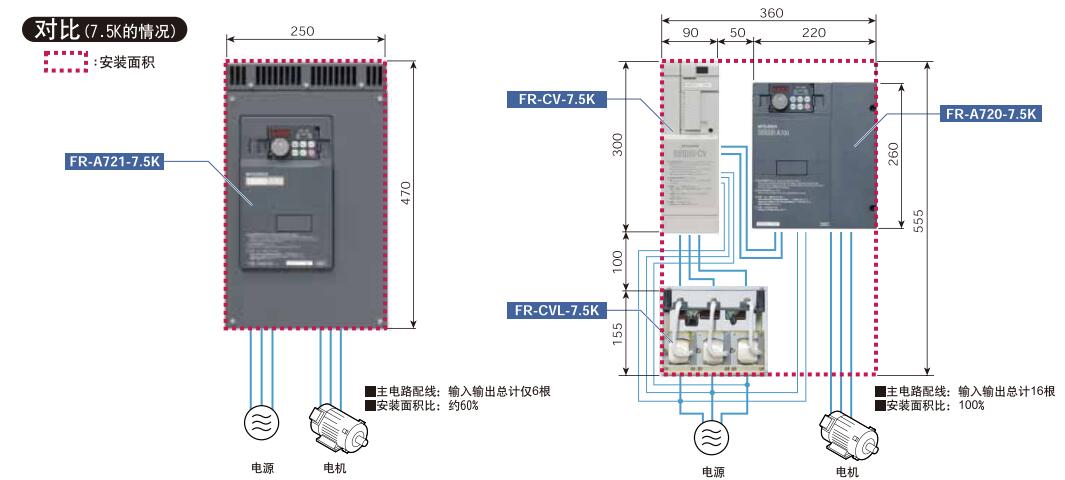
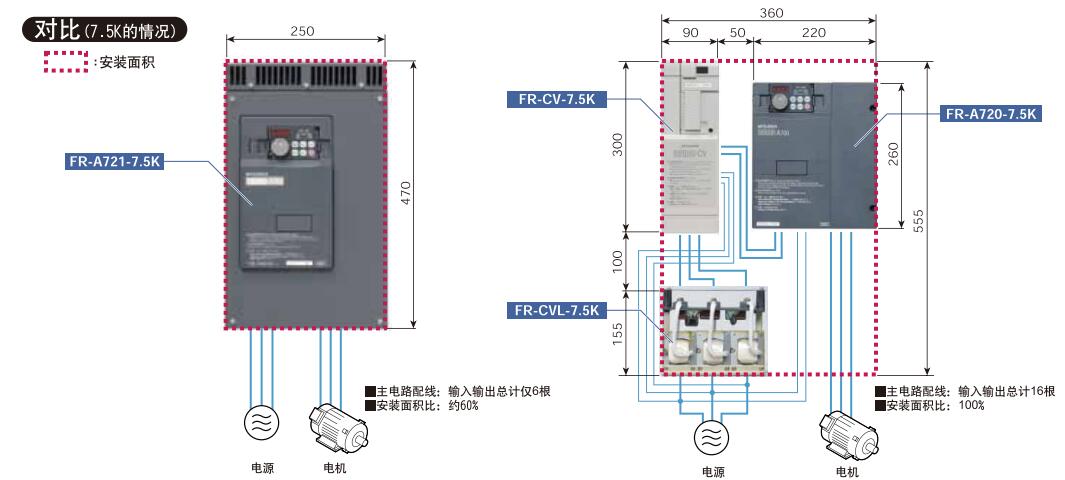
Common DC bus converter
FR-CV-7.5K

Power: 7.5kw.
Voltage: 200V.
There are 1
MITSUBISHI
Common DC bus converter
FR-CV-H37K
Power: 37kw.
Voltage: 400V.
There are 10
MITSUBISHI
AC reactor
FR-HAL-H37K
Power: 37kw.
Purpose: to suppress the po
MITSUBISHI
Common DC bus converter
FR-CV-15K
Power: 15kw.
Voltage: 200V.
There are 10